HMC-Controller
Overview
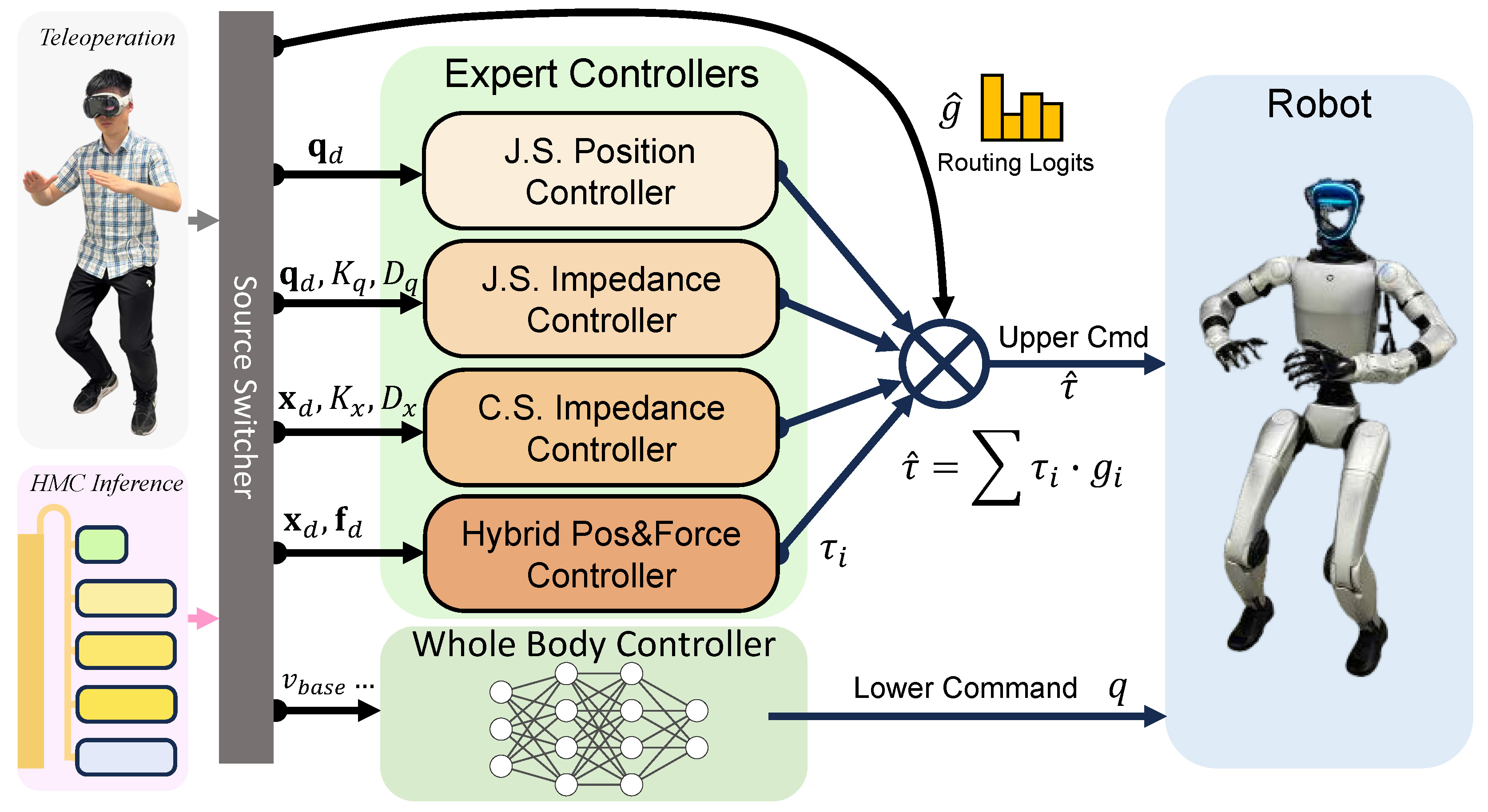
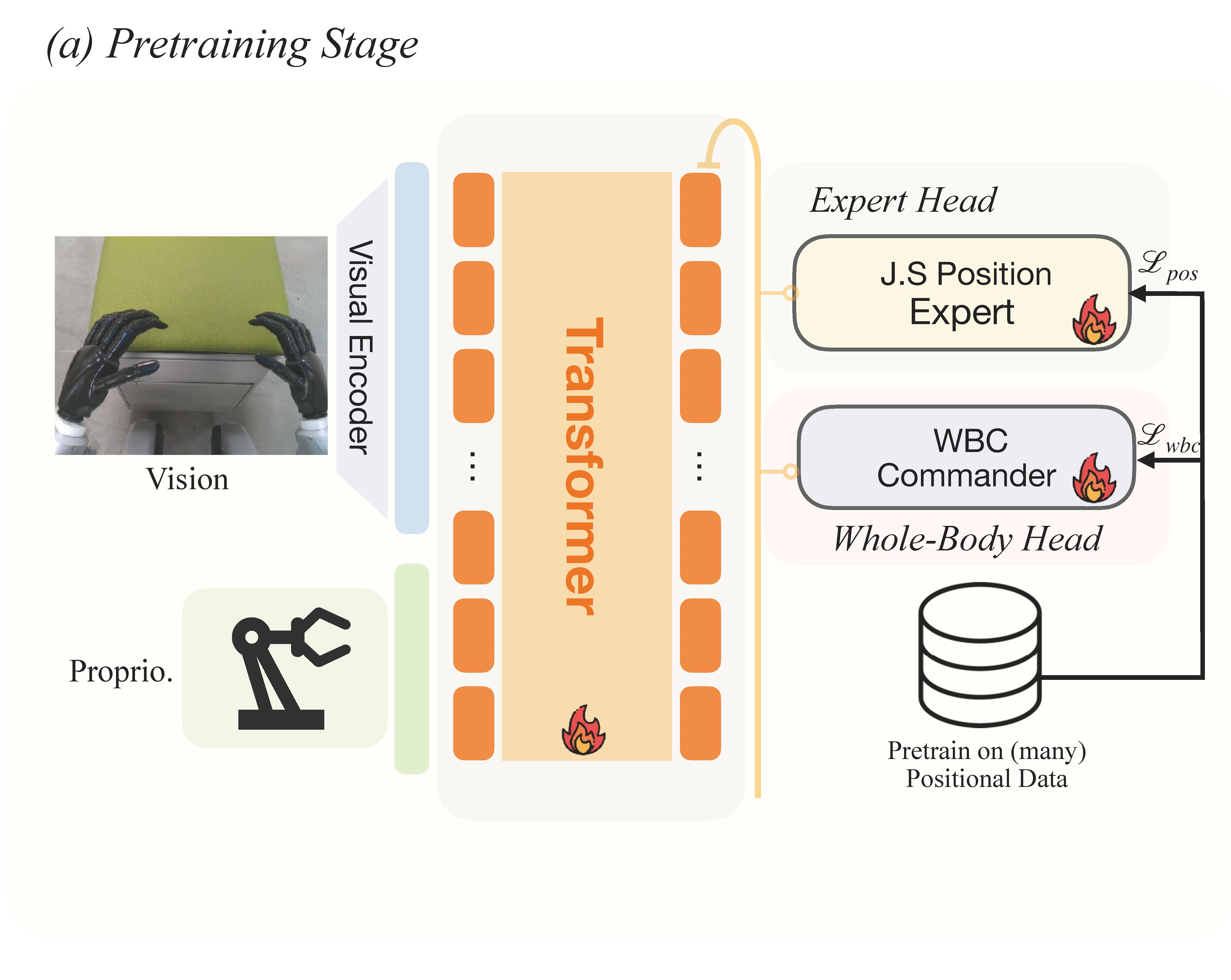
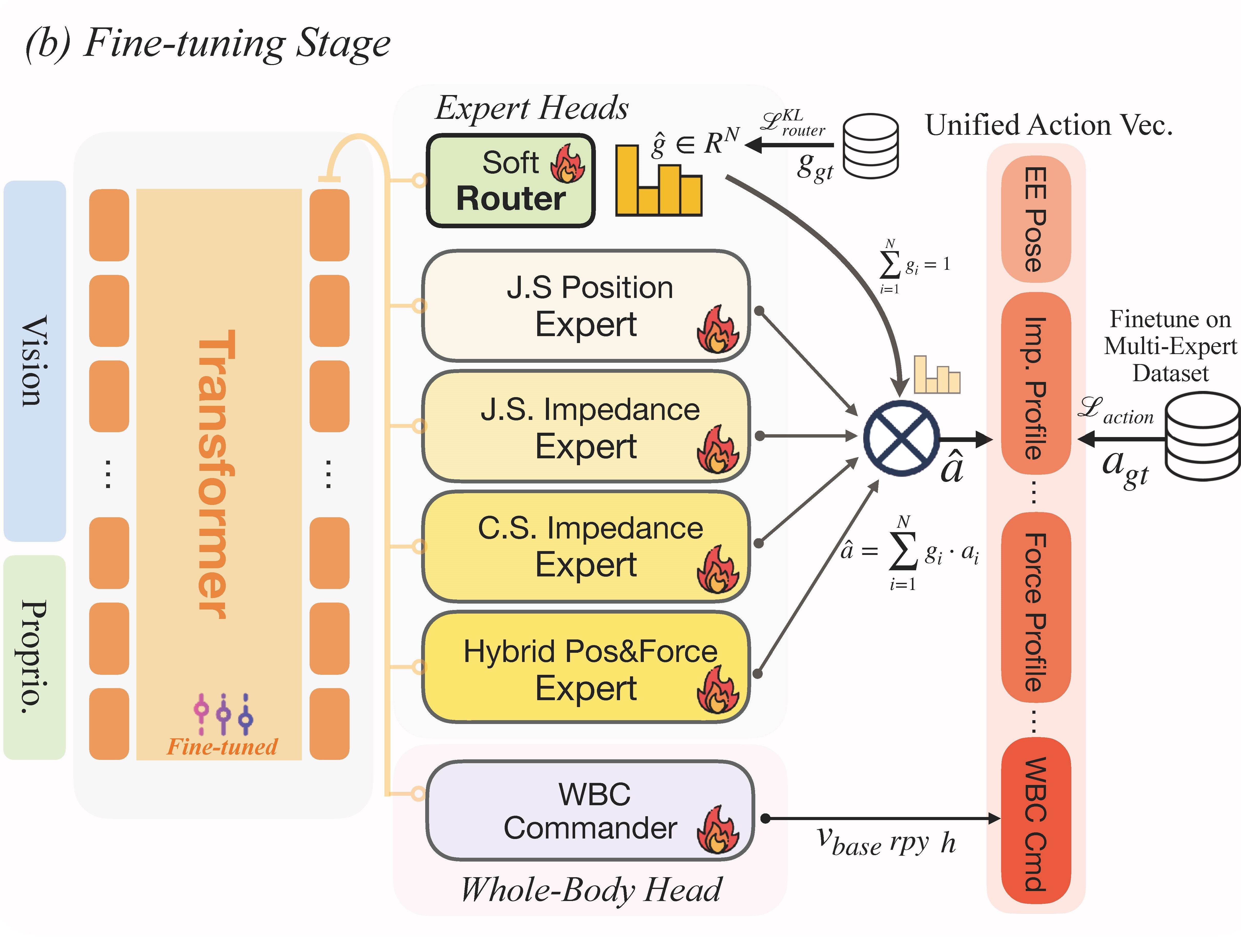
We propose HMC-Controllers, a unified control interface that seamlessly blends position, impedance, and hybrid force-position controllers in the torque space. This allows for adaptive control strategies that can handle complex interactions with the environment. HMC-Controllers facilitate both teleoperation and policy deployment, enabling robots to perform contact-rich tasks safely and effectively.
Position controller
For precise free-space tasks
Compliance controller
For forceful & contact-rich tasks
Hybrid force-position controller
For force-aware tasks
Real-world HMC Controller Teleoperation
Ours: HMC-Controller, long horizon video clip
Ours: HMC-Controller, with stiffness annotation
Comparison: uniformly high stiffness, contact-rich insertion becomes jerky and unstable, often generating excessive force and failing to align properly.
Comparison: uniformly low stiffness, motions lose precision and cannot generate enough force to complete insertion reliably.
Task: Screw-nut insertion and tightening
Ours: HMC-Controller
Comparison: Pure Position controller
Task: Peg-in-Hole Insertion
Ours: HMC-Controller
Comparison: Pure Position controller
Task: Wiping Whiteboard
Task: Opening the door
Task: Arranging the chair
Task: Opening the microwave
Task: Putting on cloth and back-tapping massage